Simulación Cinemática de Robots
La simulación cinemática permite probar el comportamiento de un robot en entornos virtuales antes de su implementación en el mundo real; herramientas como ROS (Robot Operating System) y Gazebo son comunes para simular robots y estudiar su cinemática.
La simulación cinemática de robots es crucial para el desarrollo y la validación de sistemas robóticos, este proceso implica modelar los movimientos de un robot, desde el cálculo de la trayectoria hasta el análisis de la interacción entre sus componentes, todo sin necesidad de construir el robot físico.
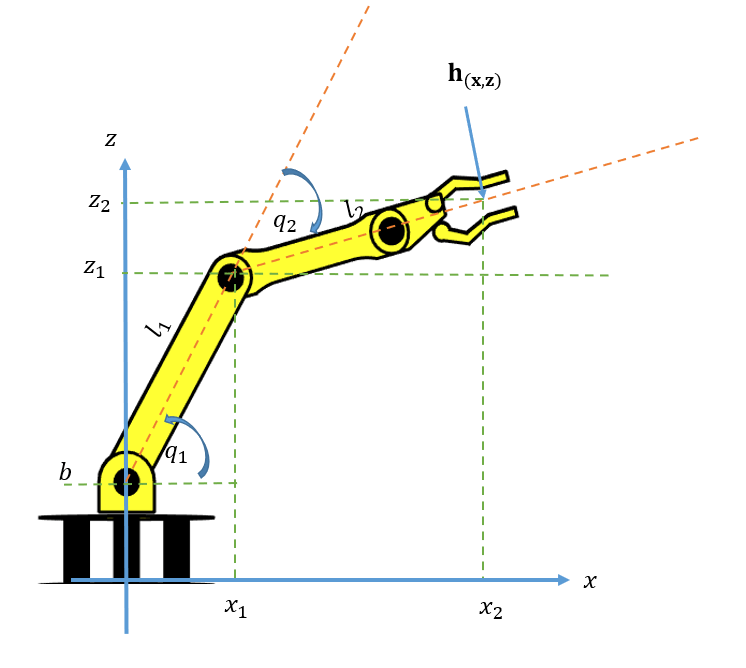
Cinemática directa e inversa: La cinemática directa consiste en calcular la posición y orientación del extremo de un brazo robótico a partir de sus ángulos articulares, la cinemática inversa, por otro lado, se enfoca en encontrar los ángulos necesarios para que el extremo del robot alcance una posición específica, estos cálculos son esenciales para que un robot realice movimientos precisos.
Simulación con ROS (Robot Operating System): ROS es un marco de trabajo ampliamente utilizado en robótica, proporcionando herramientas y bibliotecas para simular y controlar robots, uno de los módulos clave es el paquete "MoveIt!", que permite a los usuarios planificar y simular movimientos robóticos, probando algoritmos de planificación de trayectorias.
Gazebo: Es un simulador 3D robusto que se integra fácilmente con ROS, este permite crear entornos físicos virtuales donde los robots pueden interactuar con objetos, terrenos y obstáculos, simulando factores como la gravedad y las colisiones, esta simulación física es especialmente útil para estudiar cómo un robot se comportará en diferentes condiciones del mundo real.
Aplicaciones de la simulación
Ventajas
Simular el comportamiento de un robot en un entorno virtual permite experimentar con distintas configuraciones, probar diversos escenarios de operación y realizar ajustes sin dañar el equipo, además, facilita la colaboración en proyectos de robótica a distancia, donde los desarrolladores pueden compartir sus simulaciones.




Comentarios
Publicar un comentario